有源医疗设备展MedtecCASPAR机器人辅助人工全膝关节置换术
2024-09-05
CASPAR 机器人系统是一款全自动型骨科机器人。据有源医疗设备展Medtec调查发现,该系统由一个基于CT图像的交互式术前规划平台和一个改进的工业机器人组成,可以辅助骨科医生完成髋膝关节置换和前交叉韧带修复手术。CASPAR 机器人系统的硬件包含3个部分:(1)机械臂;(2)摄像头;(3)计算机系统。机械臂末端安装铣削刀具,用于铣削骨面。摄像头可以捕捉安装在各个组件上的可视化靶标进行空间位置的定位。计算机系统则根据CT数据生成术前计划,通过3D虚拟出一个手术操作地图,并将手术安全边界通过机械臂的活动进行限制。
手术步骤
01 安装基准标记钉


图2(下图) 胫骨基准钉上安装CT十字标记
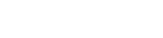
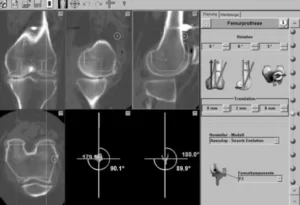
02 CT扫描及术前计划
03 手术操作


图4(上图) 腿部支架及软组织牵开器
图5(下图)牢固固定在腿部支架上的刚性反射靶标
患者采取平卧位,在手术开始之前反复屈伸膝关节,内收外展下肢,旋转髋关节等,保证机器人捕获下肢位置等信息。经过股骨和胫骨上的自攻螺钉将膝关节固定在一个特别设计的支架上。该支架也用来安装软组织自动牵开器(图4)。同侧髋关节允许屈曲50度以便将整个腿部固定在支架上。为了防止腿部出现不必要的微小运动,刚性反射靶标被牢固固定在腿部支架上,红外摄像机系统不断监控反射靶标,一旦出现过度运动,系统就会自动关闭机器人(图5)。采用传统的前正中切口和髌旁内侧入路,先完成基准标记钉注册,并使用带尖头可视化靶标,对股骨、胫骨表面轮廓进行注册。注册靶标的尖头要穿过软骨直达软骨下骨,以减少软骨对注册准确性的影响。确保骨注册通过后,可以开动机器人进行骨面铣削。全程为机器人自动操作,外科医生在旁进行监督运行状况。作为一种安全措施,外科医生需要不断地按下无菌遥控器上的机器人按钮,以保持切割动作安全。铣削刀具内部配备水冷和冲洗装置。防溅板有助于保持操作区域和反射球的干燥和清洁(图6)。铣削过程中,可以根据切割的不同类型更换铣削头。整个铣削过程大约需要18 分钟。如果需要,医生可以在手术过程中的任何时段更改为手工手术完成操作技术。一般情况下,所获得的骨表面形状准确且光滑(图7)。去除固定支架和固定针,按照术前计划采用经典技术平衡软组织。最后,植入假体。
有源医疗设备展Medtec现场将设四大专区,囊括电子光学、AI、IVD诊断及影像、检测、临床、法规、研发设计& 大动物实验专区等展品,点击此处报名参展>>>
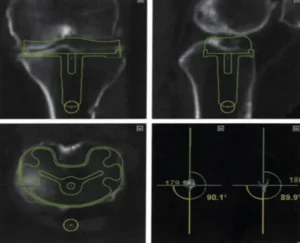
图6(左图) 防溅装置以及安装在胫骨上的注册用十字架
图7(右图) 铣削好的胫骨、股骨骨面(保留后交叉韧带)
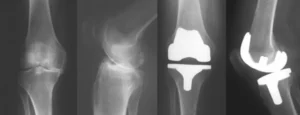
图 8 CASPAR机器人辅助全膝关节置换患者术前术后X线片
参考文献
1 Siebert W, Mai S, Kober R, et al.Technique and first clinical results of robot-assisted total knee replacement.The Knee,2002, 9 :173–180
2 Miehlke RK, Clemens U, Kershally S.Computer integrated instrumentation in knee arthroplasty—a comparative study of
conventional and computerized technique.Presented at the Fourth Annual North American Programm on Computer Assist
ed Orthopaedic Surgery, Pittsburgh, PA.2000.
3 Nuno-Siebrecht N, Tanzer M,Bobyn JK.Potential errors in axial alignment using intramedullary instrumentation for total knee arthroplasty.J Arthroplasty,2000,15:228-230
4 Bellemans J, Vandenneucker H,Vanlauwe J.Robot-assisted Total Knee Arthroplasty,CLINICAL ORTHOPAEDICS AND RELATED RESEARCH ,2007, 464:111–116
文章来源:骨今中外